
Kompositioun
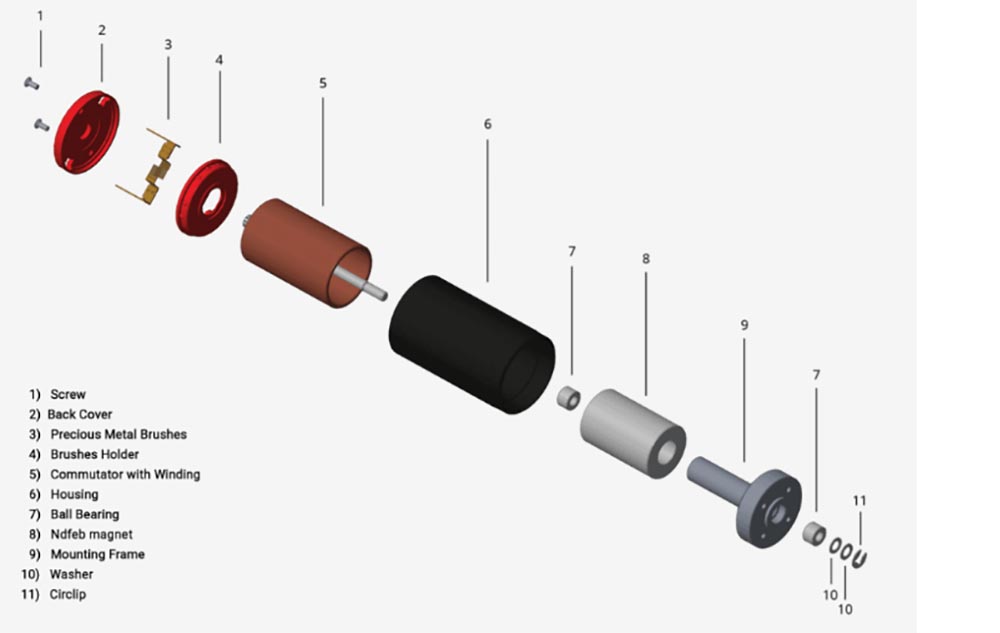
1. Permanentmagnet-DC-Motor:
Et besteet aus Statorpolen, Rotoren, Bürsten, Gehäuse, asw.
D'Statorpole si aus Permanentmagneten (Permanentmagnetstol), Ferrit, Alnico, Neodym, Eisen, Bor an aner Materialien hiergestallt. No senger struktureller Form kann en a verschidden Typen opgedeelt ginn, wéi zum Beispill zylindreschen Typ an Zilletyp.
De Rotor ass meeschtens aus laminéierte Siliziumstahlblecher gemaach, an den emailléierten Drot ass tëscht den zwou Schlitzer vum Rotorkär gewéckelt (et ginn dräi Wicklungen an dräi Schlitzer), an d'Gelenker sinn jeeweileg op de Metallblecher vum Kommutator geschweesst.
D'Bürste ass en leitfäegen Deel, deen d'Stroumversuergung an d'Rotorwicklung verbënnt, an huet zwou Eegeschafte vun der Leitfäegkeet an der Verschleißbeständegkeet. D'Bürste vu Permanentmagnetmotore benotzen eenheetlech Metallblecher oder Metallgrafitbürsten, an elektrochemesch Graphitbürsten.
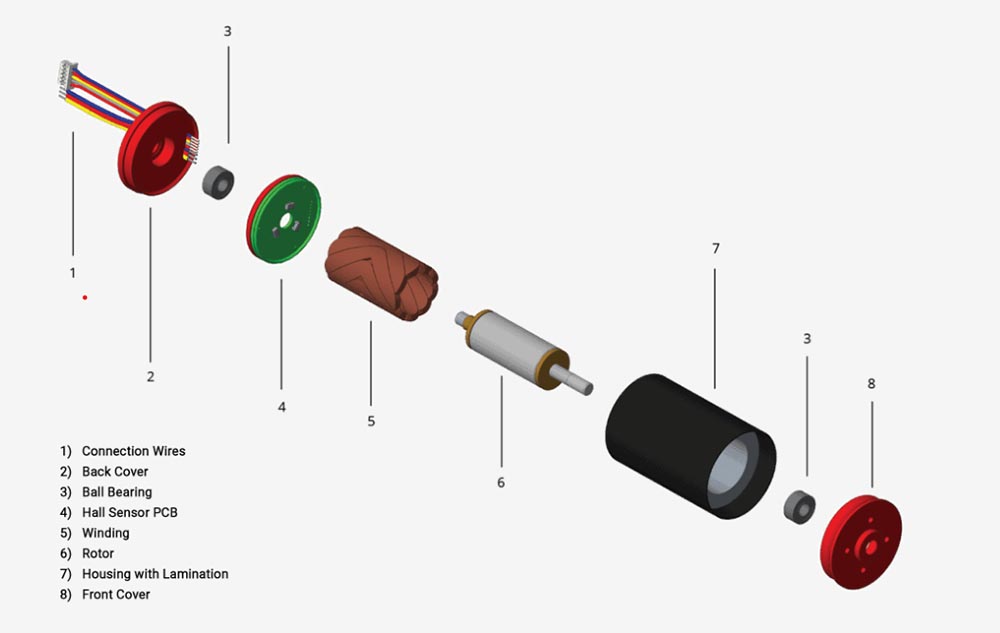
2. Bürstenlosen Gläichstroummotor:
Et besteet aus engem Permanentmagnetrotor, engem Méipol-Wicklungsstator, engem Positiounssensor asw. De bürstenlosen Gläichstroummotor ass charakteriséiert doduerch, datt en bürstenlos ass a Hallefleeder-Schaltgeräter (wéi Hall-Elementer) benotzt fir elektronesch Kommutatioun ze realiséieren, dat heescht, elektronesch Schaltgeräter gi benotzt fir traditionell Kontaktkommutatoren a Bürsten z'ersetzen. Et huet d'Virdeeler vun héijer Zouverlässegkeet, kee Kommutatiounsfunken a geréngem mechanesche Geräisch.
De Positiounssensor kommutéiert de Stroum vun der Statorwicklung an enger bestëmmter Reiefolleg jee no der Ännerung vun der Rotorpositioun (d.h. detektéiert d'Positioun vum Rotormagnetpol relativ zur Statorwicklung a generéiert e Positiounssensorsignal op der bestëmmter Positioun, dat vum Signalkonversiounskrees veraarbecht an dann ewechgeholl gëtt. Steiert de Stroumschaltkrees a schalt de Wicklungsstroum no enger bestëmmter Logikbezéiung).

2. Bürstenlosen Gläichstroummotor:
Et besteet aus engem Permanentmagnetrotor, engem Méipol-Wicklungsstator, engem Positiounssensor asw. De bürstenlosen Gläichstroummotor ass charakteriséiert doduerch, datt en bürstenlos ass a Hallefleeder-Schaltgeräter (wéi Hall-Elementer) benotzt fir elektronesch Kommutatioun ze realiséieren, dat heescht, elektronesch Schaltgeräter gi benotzt fir traditionell Kontaktkommutatoren a Bürsten z'ersetzen. Et huet d'Virdeeler vun héijer Zouverlässegkeet, kee Kommutatiounsfunken a geréngem mechanesche Geräisch.
De Positiounssensor kommutéiert de Stroum vun der Statorwicklung an enger bestëmmter Reiefolleg jee no der Ännerung vun der Rotorpositioun (d.h. detektéiert d'Positioun vum Rotormagnetpol relativ zur Statorwicklung a generéiert e Positiounssensorsignal op der bestëmmter Positioun, dat vum Signalkonversiounskrees veraarbecht an dann ewechgeholl gëtt. Steiert de Stroumschaltkrees a schalt de Wicklungsstroum no enger bestëmmter Logikbezéiung).
3. Héichgeschwindegkeetsmotor mat permanentem Magnet, ouni Bürsten:
Et besteet aus engem Statorkär, engem magnéitesche Stahlrotor, engem Sonnenrad, enger Ofbremsungskupplung, enger Nabenhülle a sou weider. E Hall-Sensor kann op der Motordeckel fir d'Geschwindegkeetsmessung montéiert ginn.
Vergläich vu gebürstete Motoren a bürstenlose Motoren
Den Ënnerscheed am Elektrifizéierungsprinzip tëscht engem gebürstete Motor an engem bürstenlose Motor: E gebürstete Motor gëtt mechanesch vun enger Kuelebiischt an engem Kommutator kommutéiert. E bürstenlose Motor gëtt elektronesch vun engem Controller op Basis vun engem Induktiounssignal kommutéiert.
De Prinzip vun der Stroumversuergung vun engem Bürstenmotor an engem bürstenlose Motor ass anescht, an och seng intern Struktur ass anescht. Bei Hubmotoren ass den Ausgangsmodus vum Motordrehmoment (ob en duerch de Getriebeverzögerungsmechanismus ofgebremst gëtt) anescht, an och seng mechanesch Struktur ass anescht.
Kärlosen gebürsteten Gläichstroummotor
Kärlosen, bürstenlose Gläichstroummotor
Zäitpunkt vun der Verëffentlechung: 03. Juni 2019